SHERLOC (Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals) is an arm-mounted instrument that is part of NASA’s Perseverance rover. It combines imaging with UV resonance Raman and native deep UV fluorescence spectroscopy in order to identify potential biosignatures and understand the aqueous history of a site on Mars. SHERLOC performs both spectroscopy and co-bore sighted microscopic imaging for scientific investigations.
WATSON captures the larger context images for the very detailed information that SHERLOC collects on Martian mineral targets. WATSON provides views of the fine-scale textures and structures in Martian rocks and the surface layer of rocky debris and dust.

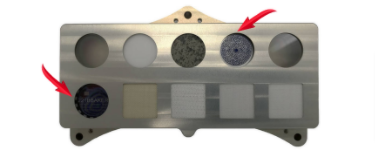
A calibration target for WATSON is attached to the front of the rover body. It contains a metric standardized bar graphic, similar to Curiosity, to help calibrate the instrument.
APPLIED IMAGE is excited to be along for the ride!